|
| Pearson 10M Electric Drive Controller and Wiring |
|
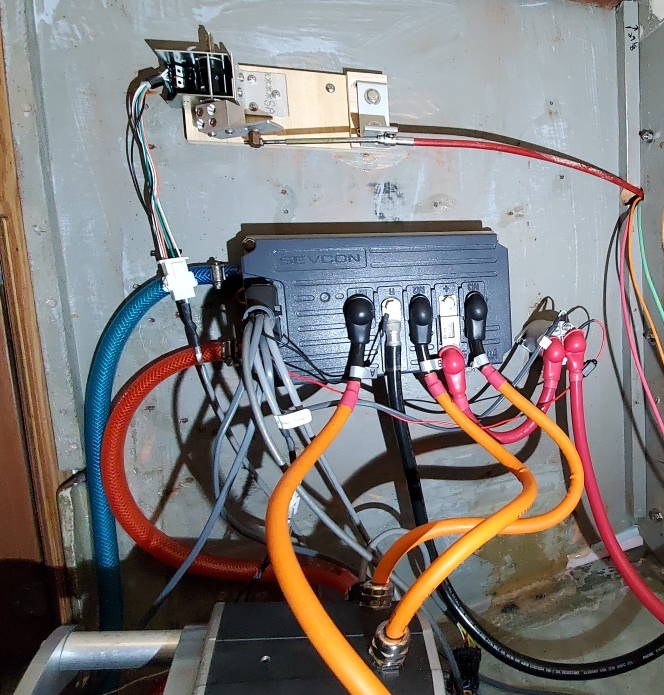
Motor Controller
The controller converts the 48VDC from the battery to the current needed by the motor. It uses pulse width modulation to control speed. It is also capable of regen where it captures energy created by the motor from the prop spinning while sailing. It puts this energy back into the battery. The controller does more than just supply power to the motor. It reads rotor position and temperature data from the motor, responds to inputs from the throttle unit, controls the cooling system, and communicates through CAN Buss to a control display app via a Bluetooth dongle.
For a great explanation of FOC check out this video on YouTube with excellent animations that do a much better job of showing how it works. |
|
Throttle Linkage
The throttle linkage provides an interface between the control lever on the steering pedestal and the small actuator that controls the motor. It uses the same cable that was used for shifting the transmission on the Volvo diesel. It is a bi-direction controller that you move for forward or reverse from a neutral position. There is a detent at the neutral postion but it can be difficult to feel through the linkage especially when there is a lot of motion of the boat (like in wavy conditions). I plan to do something to the linkage to enhance the neutral detent. Best would be to have it lock into neutral from either forward or reverse and requre you to pull a lockout lever of some sort to move it out of neutral. Going quickly from forward to reverse can impose some ugly shock load on the feathering propeller so care is requred to avoid a worrying thunk. I hope to mitigate this problem with programming more gradual acceleration curves in the controller as well.
|
|
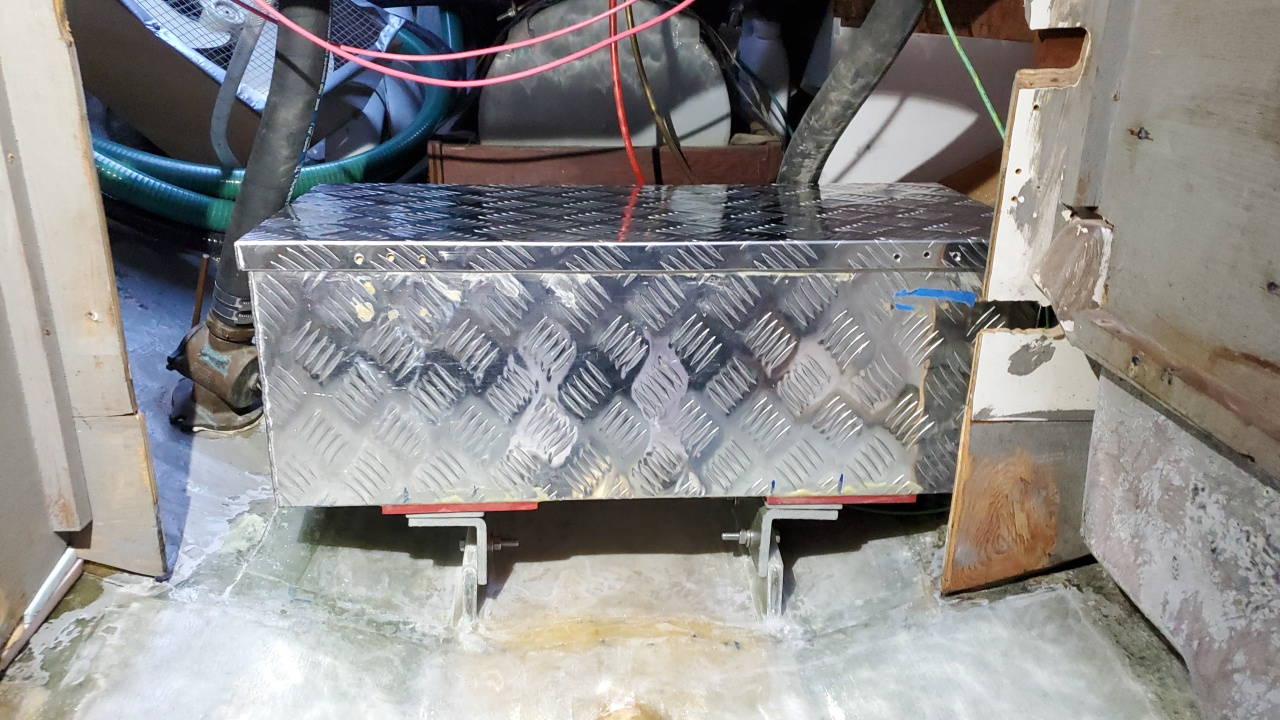
Systems installed in compartment
These photos show most of the components in place and almost ready to run. The battery is on the aft side of the aft bulkhead in the compartment. The cooling system components are mounted on the port side, the controller on starboard. The battery terminals on the brass cylinders from the buss bars can be seen on the face of the bulkhead.
|